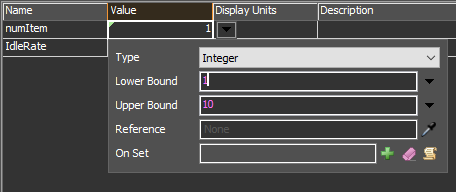
Hi. I have developed a model in flexsim in which I need to optimize the idle rate of a processor by applying RL to a robot. It has to pick up the boxes from the right queue and decide on which combiner to leave it, based on the number of boxes present on the pallet placed on the top combiner (Combiner1). I used a process flow to manage the movement of the robots and defined all the parameters of the RLToolbox. However, initializing the environment via the flexsim_env.py file I get the following messages on the terminal:
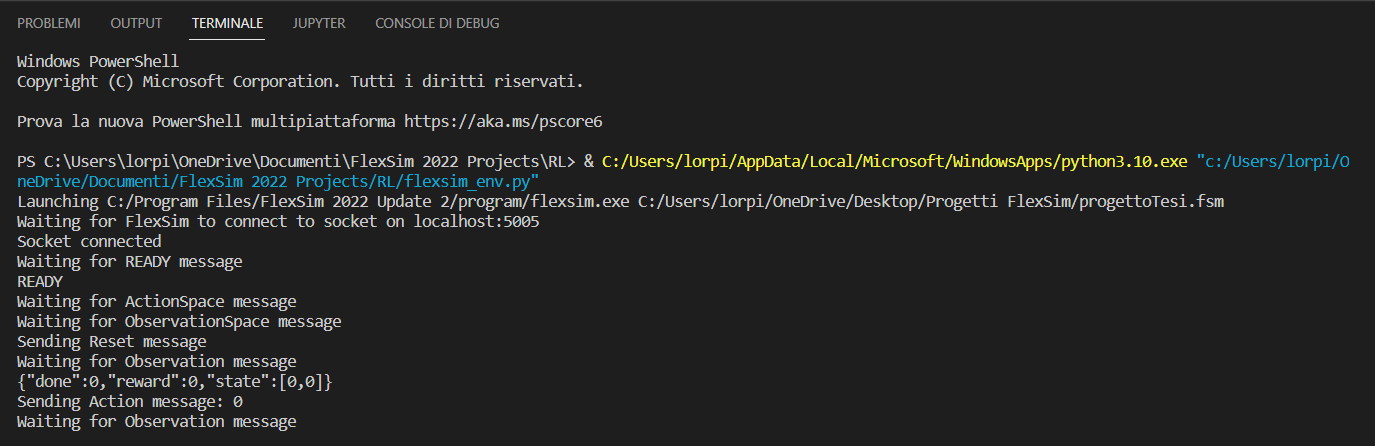
The model in flexsim opens correctly; however, it appears that parameters regarding observations and actions are not being read correctly. At the end of loading, in fact, the terminal should return me the message "Waiting for input to close flexsim". Can you tell me what this may be due to? Is there some error in the initialization of the parameters?