Is it possible to stop an AGV with a control point as it approaches a crosswalk (without process flow)?
FlexSim 16.1.0
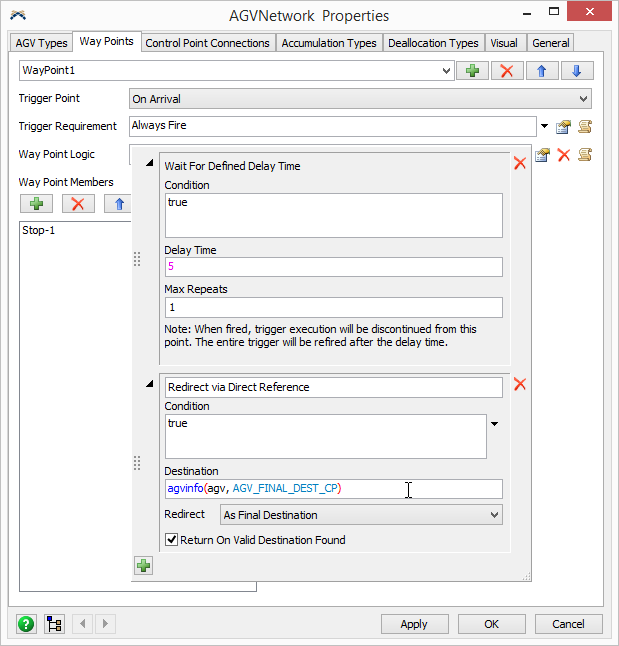
The "Wait for Defined Delay Time" behavior is designed to be used in conjunction with other behaviors in the Way Point Logic trigger. The "Wait for Defined Delay Time" calls agvredirect(agv, currentCP, REDIRECT_AND_WAIT); to get the AGV to stop. Then it fires the Way Point Logic trigger again after the delay time.
You can add a "Redirect via Direct Reference" behavior after the wait in order to get the agv to then continue to its final destination. You can use the agvinfo(agv, AGV_FINAL_DEST_CP) command to get a reference to the agv's destination control point.
For an optional simple way to do it if you end up deciding to use Process Flow, all you need to do is make a "Travel" activity to the control point, then an optional "Delay" activity for however long you want the task executer to stop. If you don't have a "Delay" activity the task executer will still stop briefly. Updated model is attached if you're interested.
6 People are following this question.

{kind=link}