Hi,
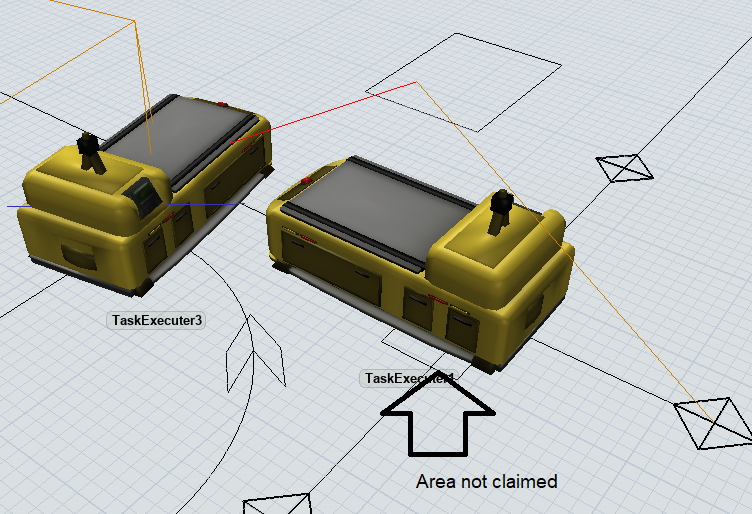
Attached is an example model where AGV1 needs to wait on AGV3 before it can continue to the final destination. Before AGV1 needs to wait is passes a control area. The AGV does not claim this area when traveling through it (I guess because of off set travel). The strange thing is that when the AGV can continue to travel (at time 18.25) it does claim the area. In this model that is fine, but in a model, I posted as a private question this creates a deadlock because another AGV claims the area before AGV1 does. The other AGV is not able to continue because AGV1 is in the way.
Thank you for explaining the AGV behavior,
Patrick