I am trying to make the robot arm load the box from the queue first before going to the processor and exchanging that box with the one on the processor, if there is one, before throwing the processed box in the output but the robot always ends up clearing the processor before loading from the queue. I have tried a bunch of things that did not work so I am just posting the main model. Hopefully my explanation is sufficient. (give it a warm up time of ~660 seconds) Prototype19.fsm
If the maximum content of the processor is set to 1, the queue will not send a new item until the processor is empty, which is why the robot will always need to clear the previous item.
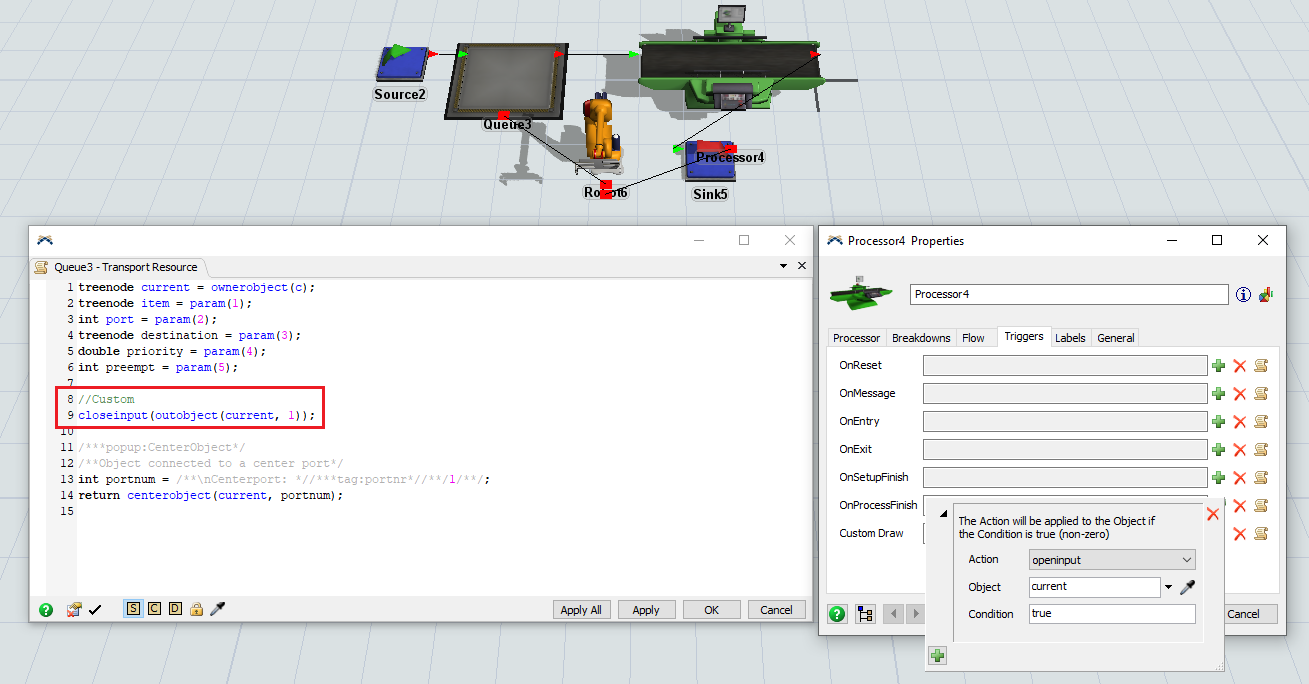
To make it work as you describe, you can set the maximum content of the processor to 2. Then, in order to prevent it actually processing more than one item at a time, you add a code line to the "Use Transport" code of the queue, closing the input of the processor right after sending an item to it. In the processor's "On Process Finish" trigger, the input can be opened again.
"On Process Finish" happens before the "Send to Port" of the processor is evaluated, the task to move a new item to the processor (if one is available in the queue) will be created ahead of the task to clear the processor.
14 People are following this question.
