I would like to change the calculation method for the AGV utilization rate and calculate the utilization rate for two individual AGVs.
Currently, I know that I can use "STOPPED" to record the movement from ControlPoint1 to ControlPoint2 for AGV1 in the utilization rate calculation. However, if I want to add another AGV and group the two AGVs together to track the status of the movement from ControlPoint1 to ControlPoint2, the results show that when AGV1 passes through, AGV2 is also simultaneously counted. This is different from what I imagined.Text.fsm
(The AGV1 uploaded by this model is the effect I want to achieve.)
change the calculation method for the AGV utilization rate
FlexSim 20.1.3
Hello @Q9284226 ,
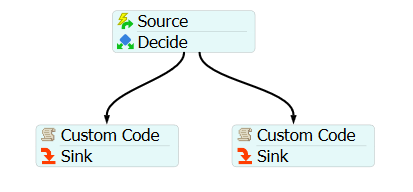
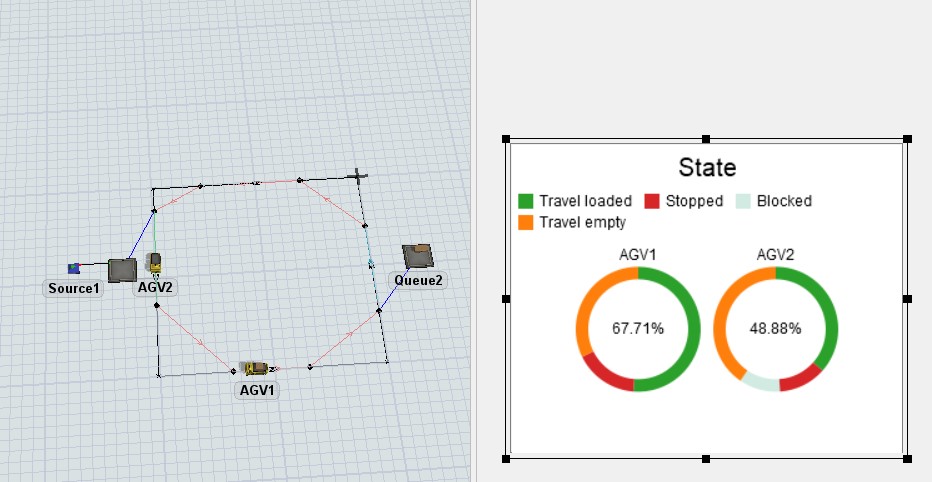
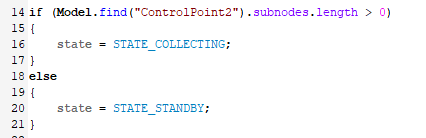
If I understand your question correctly, you can achieve this outcome by adjusting your process flow to change the AGV state for both AGV1 and AGV2 when they pass through control point 1. This keeps track of the state of both AGVs when they are between control point 1 and control point 2.
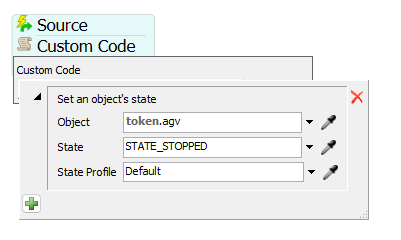
Note: you can also set the state of each AGV with their own activity but it is simpler to just edit your custom code activity to set token.agv
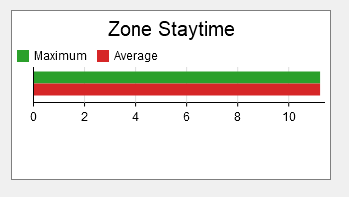
If you want to monitor statistics on the area between control point 1 and control point 2. You can create a zone to track the AGVs when they pass through that area. This allows you to track staytime and other statistics within this zone.
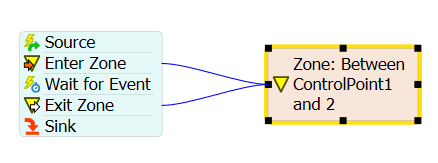
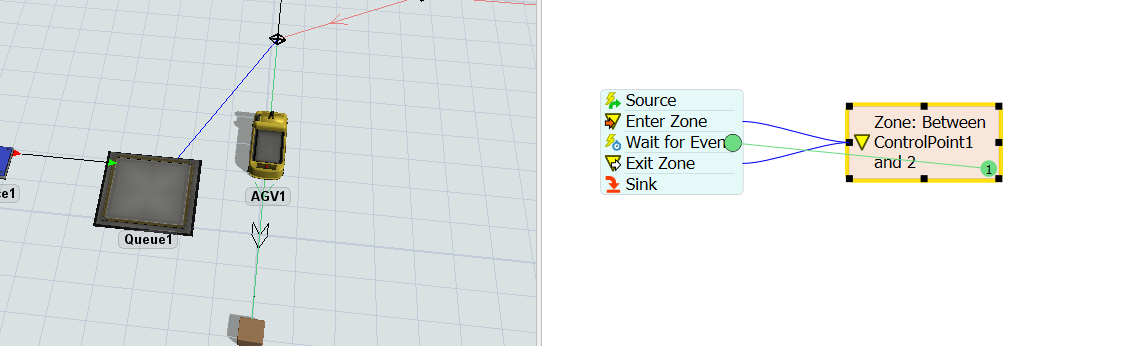
Notice how when an AGV is in this area a token shows up in the zone.
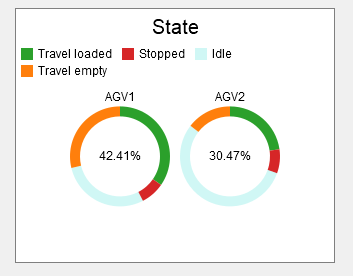
Be cautious when trying to track this physical area by measuring states because states constantly change within an AGV network.
Does this answer your question? the updated model is attached above
16 People are following this question.
