Hi I am using AGV network for my AGV to travel, guided by process flow logic.
Currently, when the AGV travels to the pick up point, it is performing as intended, as shown here in the sequence below.
AGV travel to pick up control point: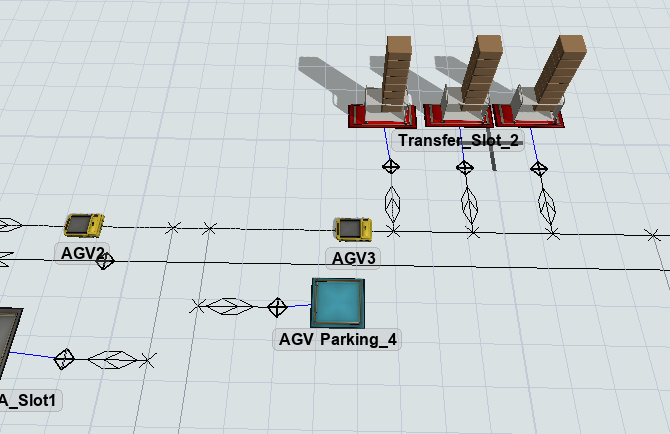 AGV pick up and Travel loaded to main path (blue):
AGV pick up and Travel loaded to main path (blue):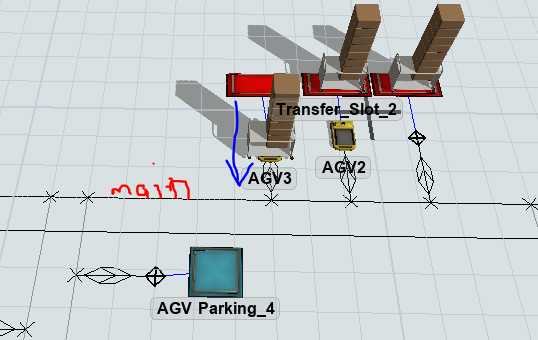
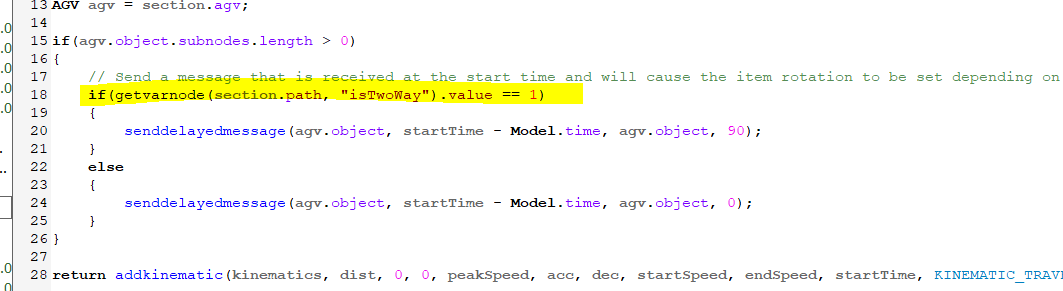
However, when AGV enters main path, turn and travel, the trolley should not turn with the AGV as the trolley should be parallel with the path (red):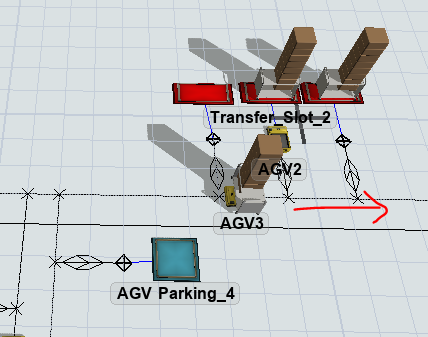
Hence, I am trying to find a way so that the agv knows that whenever it enters a the main path for the very first time only after loading, it should turn independently.
Also would like the reverse on unload (when it exits the main path)
Any help given would be very much appreciated!
SimModel Rev.2.zip
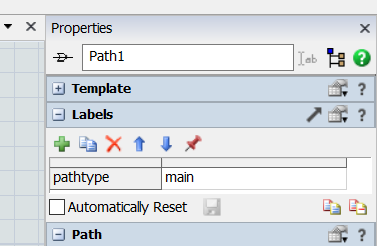
Notice that there is label in the path 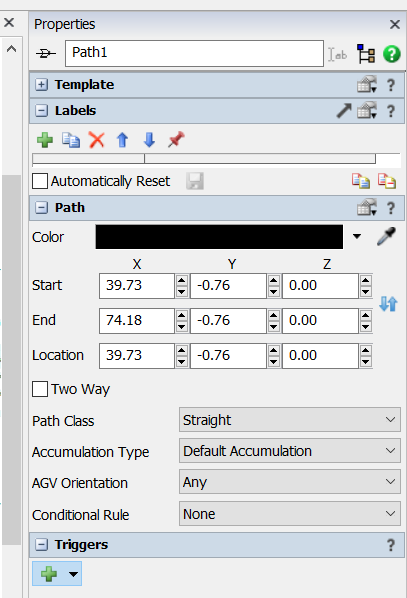
which may be use for classifying certain path as main