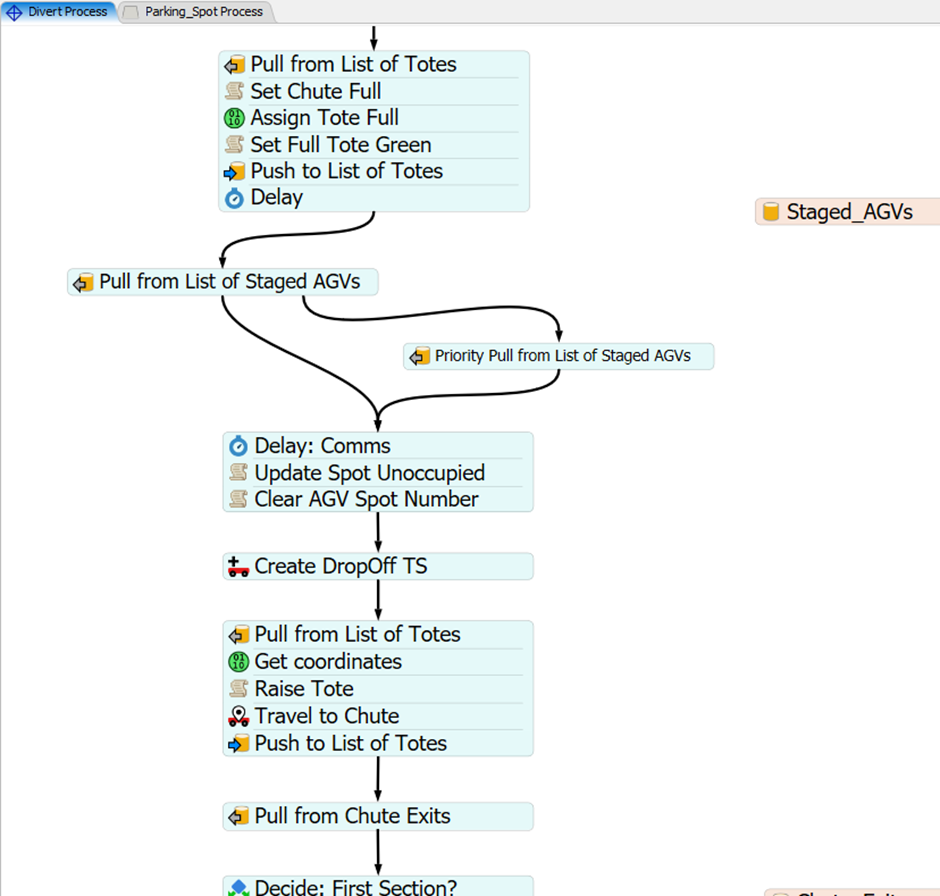
I have a model where AGVs sequence down parking spots and each spot is responsible for operating a set of chutes when totes become full. I was recently asked to add a tote priority where a full tote can pull from an 'upstream' AGV parking spot, as well as the 'assigned' spot. This all works fine, except that an AGV between spots will be ignored in favor of AGVs at the spots and the selected AGV might be behind the AGV we really want (blocking the selected AGV until the other one clears out as well).
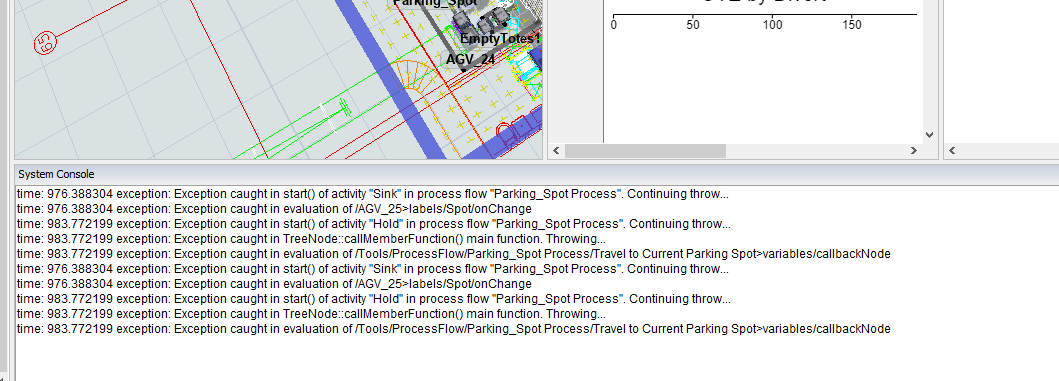
I somehow need to keep the AGVs that are moving between spots in the Parking_Spot process accessible to the Divert process flow. I briefly tried keeping AGVs on the list (not removing them, just accessing them) to move from one spot to the other but that didn't work. Any help is greatly appreciated
Aegis_AGV_Remodel_wHeadstart_2_13_2025.fsm