Hello !
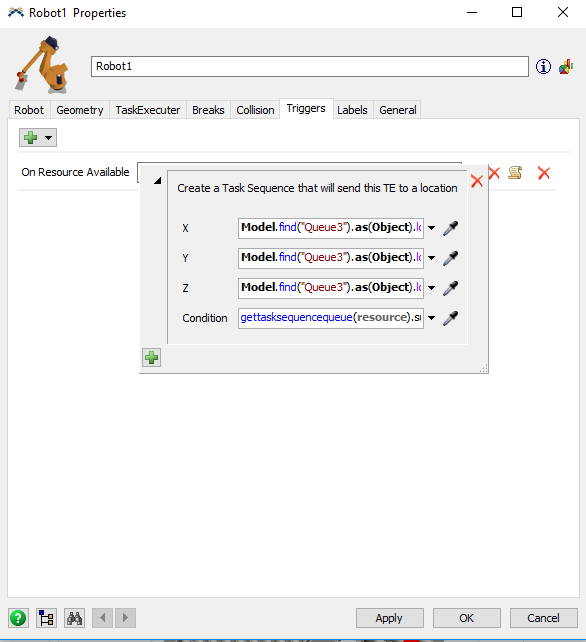
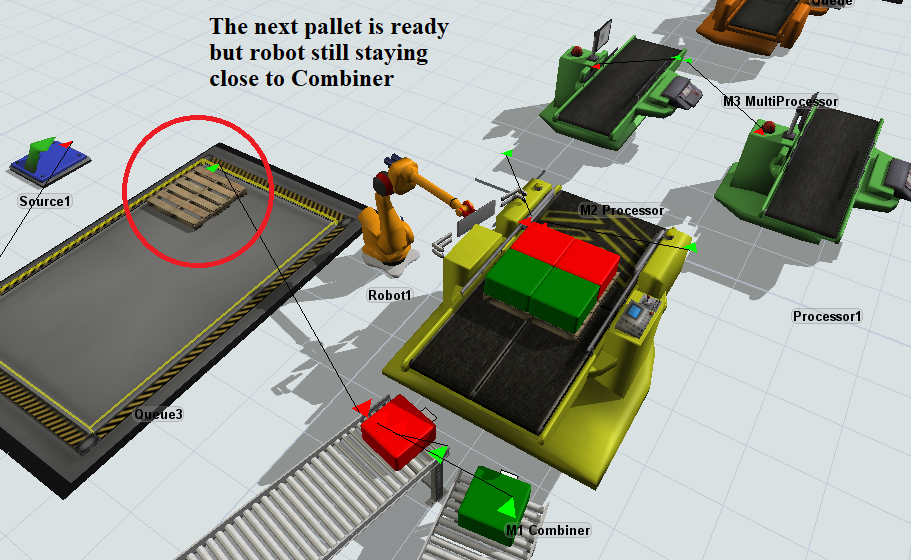
The robot in my model picks the pallets and loads them onto the combiner. Then it stays close to the combiner like he's controlling the work on Combiner. What im trying to do is make the robot leave the combiner and take instantly another pallet. Then it should wait until combiner is empty and then unlad the pallet. It will speed up my process. I tried to make a logic in process flow but it doesnt work.
I have also a few more question about my model. How i can comunicate with Flexsim Partners excluding this forum ?
Thank you for interest ! ;)