Hello,
I am trying to model a robot cell using process flow...
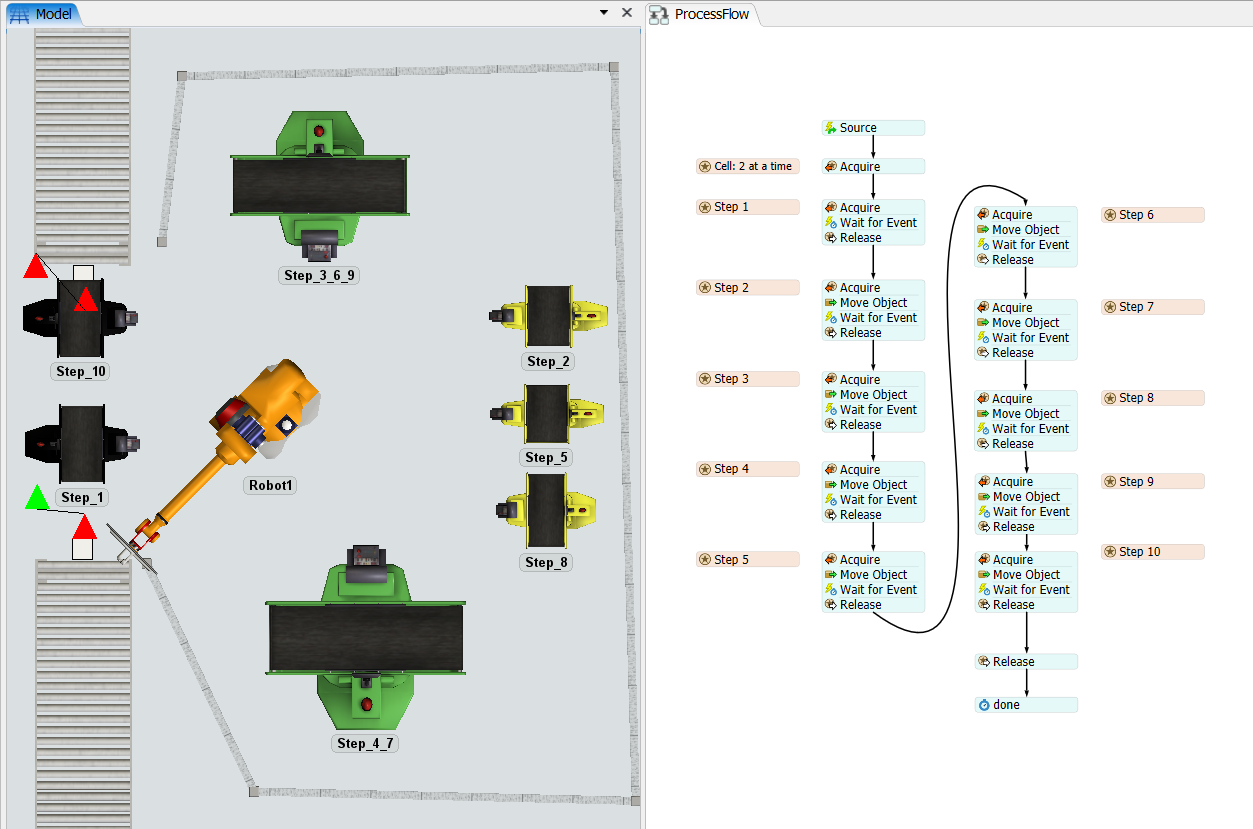
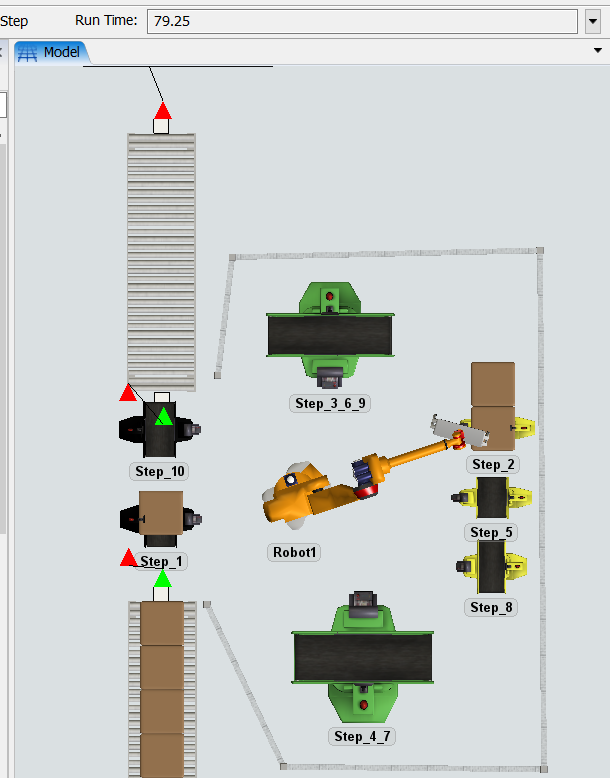
I tried modeling this robot cell with standard 3D model logic, but it got complicated trying to keep up with the order and getting the priorities right since 2 of the processors are used on multiple "steps" for one flowitem. With process flow, I was able to get the material to flow the way I like, but I can't figure out how to use the robot for transport between each "Step"/Processor. I tried checking "Use Transport" and connecting the robot to every processor with a centerpoint connection, but I believe my "Move Object" process flow logic overrides the "Use Transport" 3D logic.
Any help would be greatly appreciated. Thank you!
Model: Robot Cell Process Flow.fsm