I want to move the robot joint with code. (To operate the robot with plc data)
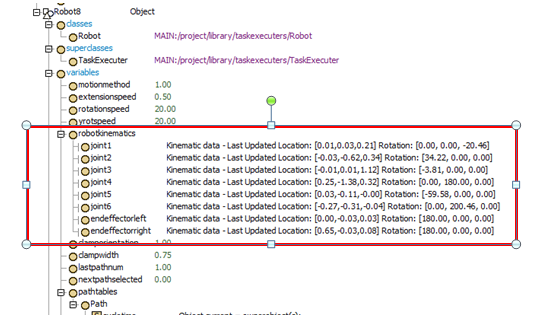
I think I can control it with "robotkinematics" command.
I want to know how to use the ‘robotkinematics’ command.
Please, Help me
I want to move the robot joint with code. (To operate the robot with plc data)
I think I can control it with "robotkinematics" command.
I want to know how to use the ‘robotkinematics’ command.
Please, Help me
Please read about kinematics in the manual.
But why do you want to accomplish such a task with a very slow, asynchronous transfer protocol? It is really difficult to synchronize a high speed application like a robot controller with a runspeed controlled simulation tool like FlexSim on a windows system. You find several robot controller using a windows system, but they synchronize their robot drives by a realtime virtual machine running on Windows. And they transfer the destinations and path parameters to an independent running realtime controller in the robots.
11 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.